Koca yaz birşeylerin peşinden koşmadan geçmezdi. Bizde elimizdeki imkanlarla nasıl bir deney, çalışma yaparız diye düşünürken oğlum Efe‘nin önerisiyle evde kolayca yapılabileceğini gördüğüm kuluçka simulatörü diyebileceğim bir gereç yapmaya karar verdik. Yaptığımız bu mini, eğlenceli çalışmanın yol hikayesinden bahsetmek istiyorum.
Kısa bir çalışma sonunda gördüm ki, oğluma karşı utanmamak ve mini-projeyi hayata geçirebilmek için bir çalışma sistemi uygulamamız gerekiyordu.  Yolun başında ancak belli bir disipline, sistematiğe uygun hareket edersek mutlu sona ulaşacağımızı öngörebiliyordum. Detaylarına girip konuyu dağıtmamak için bahsetmeyeceğim ama düzeni sağlamak için çeşitli yöntemleri ve bu yöntemlerin kullanılmasına ilişkin yol haritasını içeren bir problem çözme yaklaşımı DMAIC ile sistemimizi çalışmamıza uyguladık.
Yolun başında ancak belli bir disipline, sistematiğe uygun hareket edersek mutlu sona ulaşacağımızı öngörebiliyordum. Detaylarına girip konuyu dağıtmamak için bahsetmeyeceğim ama düzeni sağlamak için çeşitli yöntemleri ve bu yöntemlerin kullanılmasına ilişkin yol haritasını içeren bir problem çözme yaklaşımı DMAIC ile sistemimizi çalışmamıza uyguladık.
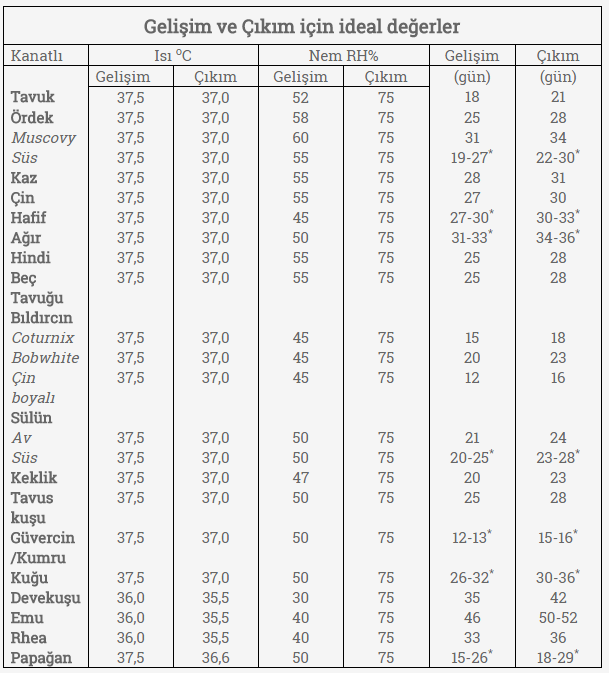
Önce amacımızın temelini oluşturan tanımlamalarımızla, yumurta ve kuluçka ile ilgili teknik detaylarla ilgili verileri topladık. Çok basit olsada belli hassas detaylar içeren bir konu olduğunu daha ilk anda anlamaya başladık. Hasarlı bir civciv almamak için sıcaklığın ve nemin çok ufak töleranslarla çalışması gerektiğini, töleranslar aşılırsa çıktımızın hasarlı (!) olma ihtimalini öğrendik. Özetle hata yapmamaız gerekiyordu. Online yayınlanan Resmi bir kaynaktan aşağıdaki tabloyu kendimize referans olarak aldık.
Daha sonra sistemimin beynini oluşturacak Atmega328 mikroişlemcisine sahip Arduino UNO ile verileri işleyip elektronik ekipmanlarıda onunla paralel çalışacak şekilde seçtik.
Sistemimizin elektronik (ve elektrik) yapısı şöyle şekillendi;
- ArduinoUno
- DHT22 Sıcaklık&Nem sensörü
- LM35 Sıcaklık sensörü
- SG90 Servo Motor
- 5V tetiklemeli 5V-220V ikili röle
- IR Remote (Uzaktan kumanda)
- 16×2 LCD Display
- 10k Potansiyometre
- 30W Ampul (ısıtıcı)
- 5V Fan
- Çıkım kontrolü için PIR Hareke sensörü (Kullanılmadı-Gerek kalmadı)
- Buzzer (Alarm-Gerek Kalmadı)
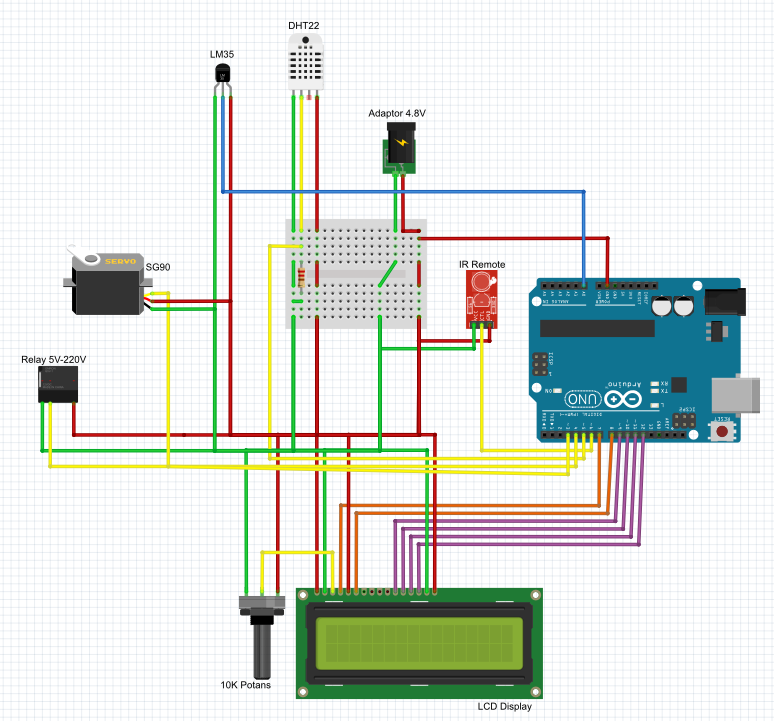
Parçaların temini sonrasında olası hata durumunda ileriye dönük müdahale gereksinimi için bağlantıyı aşama aşama fritzing ile çizip bağlantılarımı kayıt altına aldım. Bu yaşadığım bir kaç kriz anında çok avantaj sağladı, kesinlikle tavsiye ederim.
Yaptığım çalışmanın detay çizimi şöyledir;
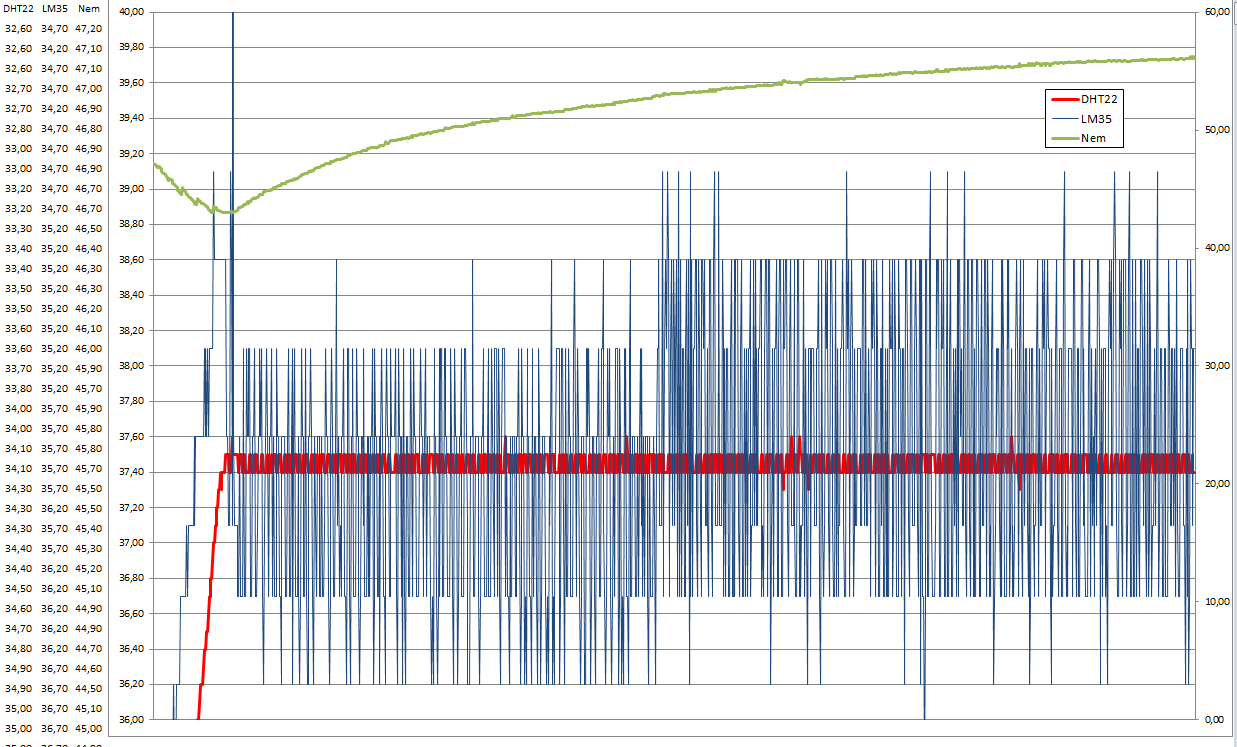
Çizimle birlikte elektrik-elektronik aksam tamamlandıktan sonra denemelere/simulasyonlara başladım. Bu simulasyonlarda asıl amacım stabil sıcaklık nem verisi oluşup oluşmadığını gözlemlemekti. Bunun için bilgisayarın seriportunu kullanarak bir süre ve birkaç kere sistemimin düzenli veri üretmesini sağladım. Veriler bana ek fayda olarak LM35 ve DHT22’ninde yapabilirliklerini göstermiş oldu. Verilerin loglanma ve excel üzerinde işlenmiş görüntüleri aşağıdaki gibidir;

(Resimleri büyütmek için üzerine tıklayabilirsiniz)
Üstteki resimlerde DHT22’nin (Kırmızı) LM35’e (Mavi) göre ne kadar dar bir aralıkte ve kararlı çalıştığını görüyorsunuz. Ayrıca Nem (yeşil) konusunda da oldukça iyi olduğunu söylemeliyim.
Sistemim, sıcaklık&nem üst+alt limitlerini uzaktan kumanda ile belirlediğim, verileri anlık LCD display üzerinde gösteren, değerlere göre kendi hesaplamalarını yapıp Röle yardımı ile ısıtıcı yada havalandırmayı devreye alan/devre dışı bırakan, tüm ölçümlerini bilgisayara loglayan bir yapıda çalışıyor.
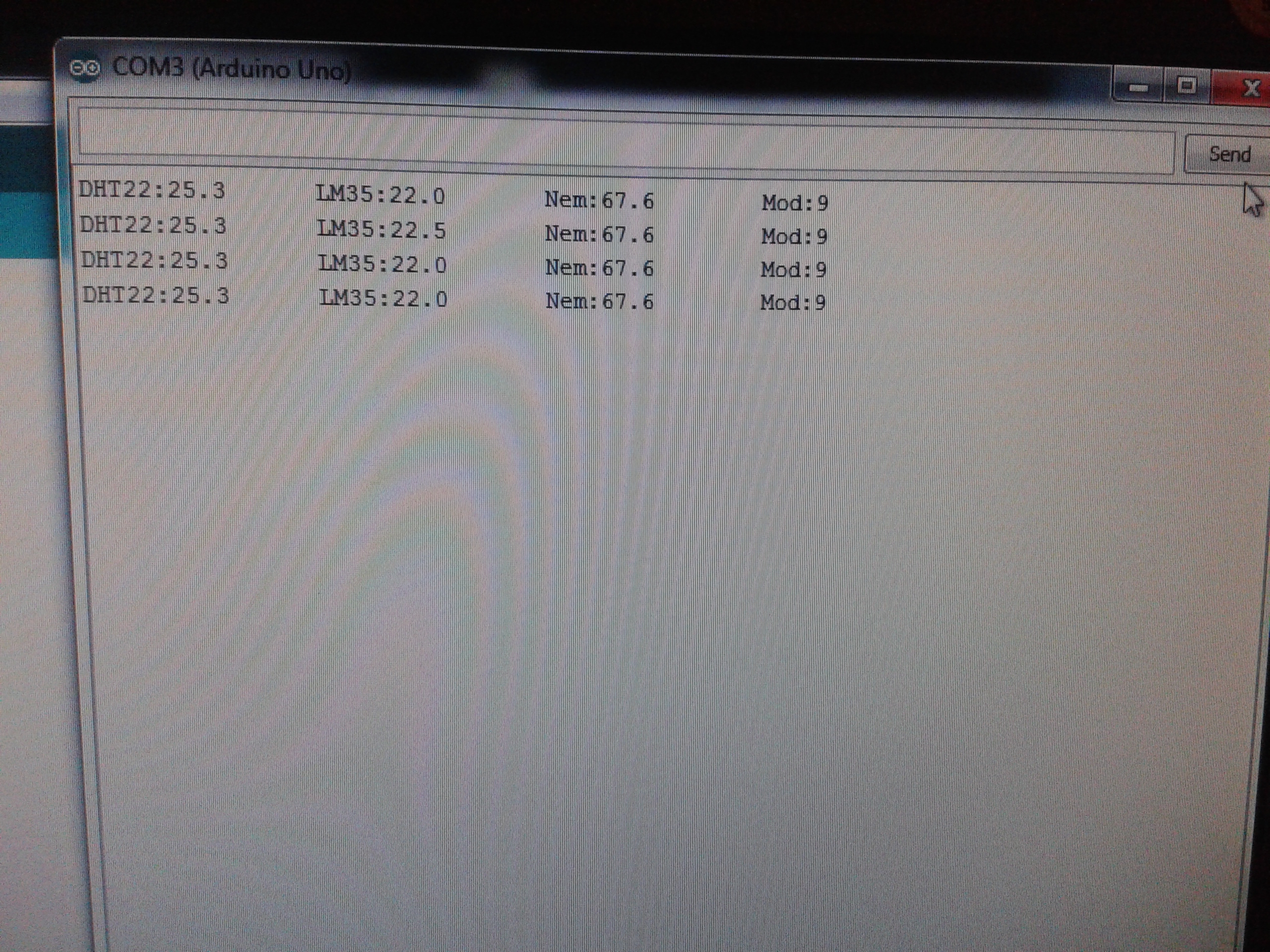
Yaptığım bu simulasyonlarda, ve aldığım tavsiyelerde sadece digital olarak değil, harici olarak da bu sıcaklık nem verisini takip etmem önerildi. Emin olabilirsiniz ki aldığım en saçma, en gereksiz öneriydi. Neden mi? Resimdebirbirinden farklı harici sıcaklık ve nem değerlerini lütfen inceleyin. Hepsi ayrı telden çaldığı için ben ortalama bir değerle hareket ettim.

Hareket mekanizmasını Efenin legoları ile benim SG90 servo motorumu birleştirerek hibrit bir krank yaparak aştık. Tabi tecrübe ettiğim için paylaşmalıyım ki, SG90 ufak ve anlık çalışmalar için ideal olsa da, yarı ciddi ve süreklilik gerektiren özellikle az da olsa eşik çekiş gücü gerektiren projeler için uygun değil. Şahsi tavsiyem, RC uçak kanat sistemlerinde kullanılan servolardan daha çok verim alırsınız.
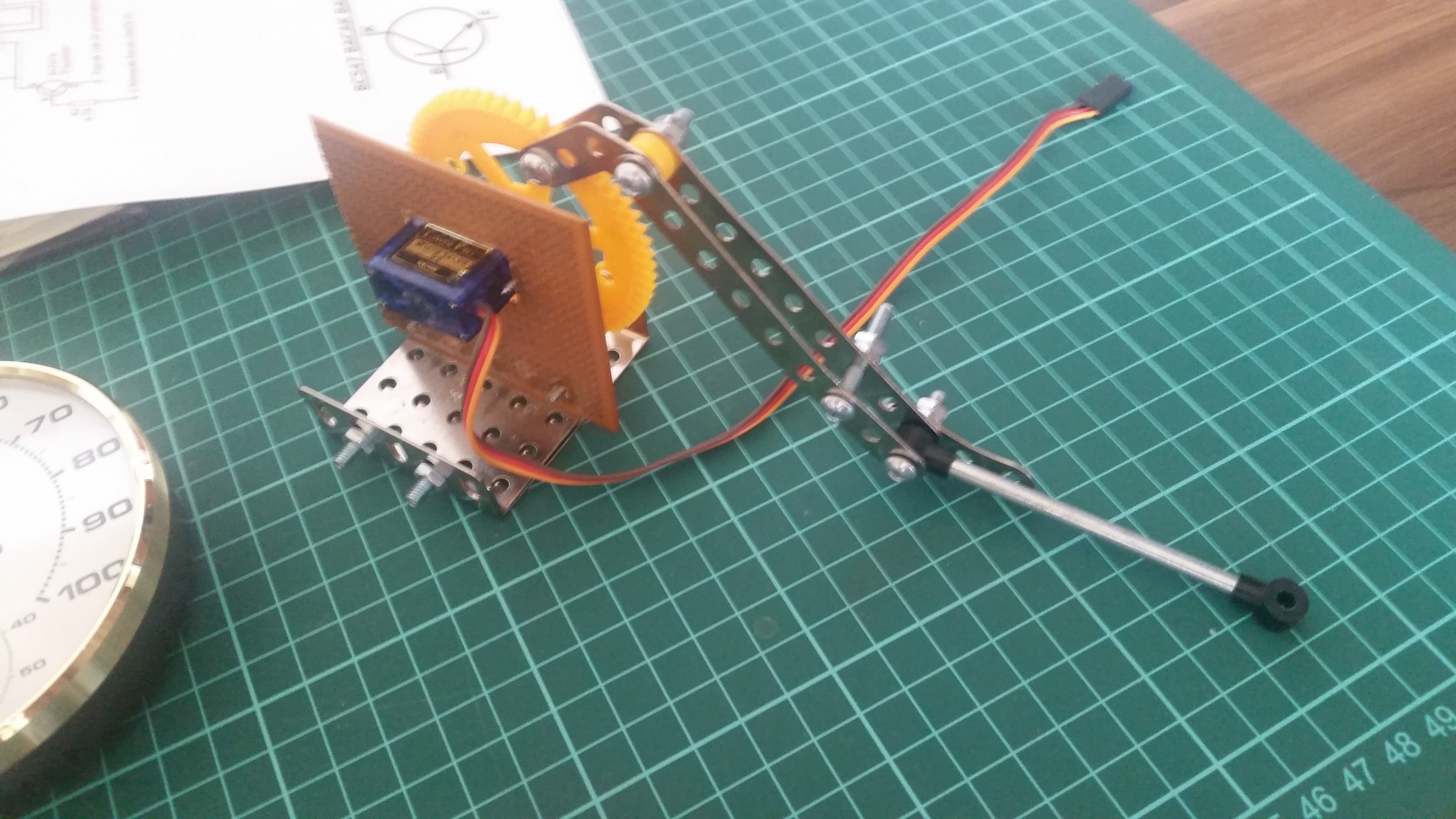
Sanırım konuyu çok uzattım, sadede geliyor ve hızlıca geçiyorum. Yumurtaların salınımı için yaptığım kalın bakır telden yaptığım yumurta sürükleme ağ sisteminin resmi şöyle;

Simulasyon dönemi içersinde servo gücü ve yer darlığına paralel bu ekipmanı biraz kısaltmak zorunda kalsamda, fena olmadı diyebilirim.
Gene simulasyon döneminde çektiğim bir fotoğraf;
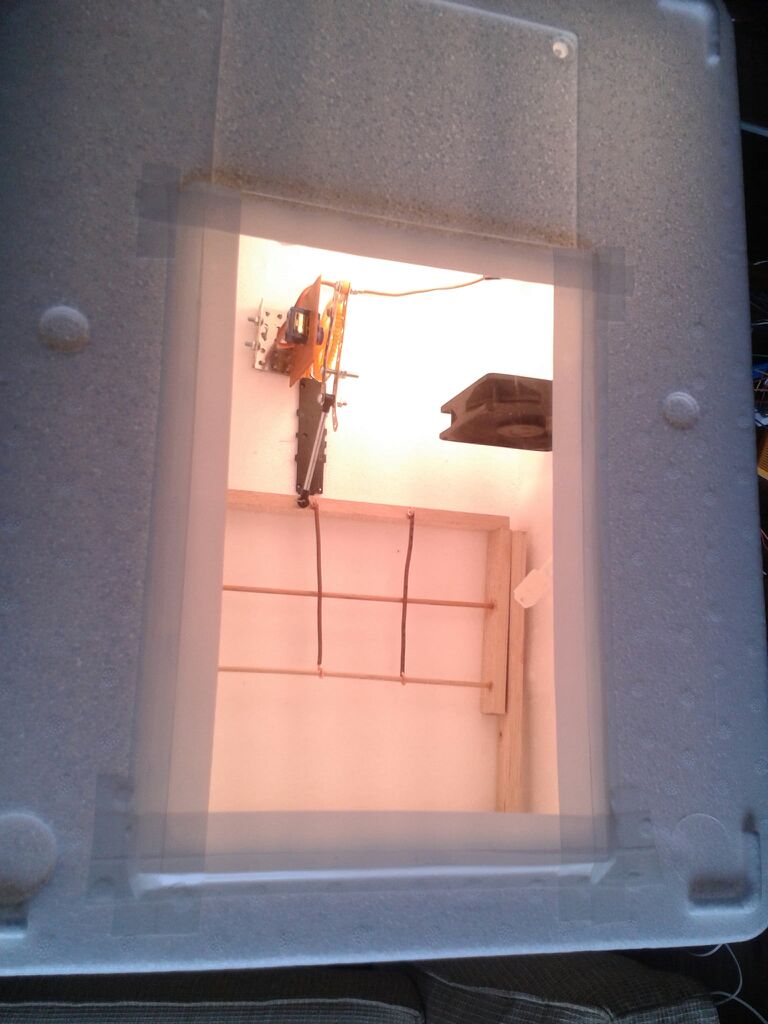
Denemeler sonucu gelişen ve son halini aldığım sistemimin 18.gün sonunda kuluçka görünümü şöyleydi;



ve 22.gün sabahı mutlu son;

Efe & Hakan Müştak @2015/08
Not : Çalışmanın her aşamasında (yumurta temini, ekipman temini, naz çekme…vs) her konuda bize destek olan Aziz Şenşutmana da sonsuz teşekkürler.
{kind=link}
{kind=link}
gayet güzel hazırlamışsınız tebrikler.yumurlataları nerden satın aldınız?
Merhaba,
Yazının sonunda bahsettiğim arkadaşım temin etti.
kodu nereden alabiliriz?
Müsait bir zamanda arşivimi tararım, bulursam paylaşırım. Karmaşık bir sistem değil, “dene-yanıl” yaparak kolaylıkla daha iyisini yapabileceğinizi düşünüyorum.
Hocam arduino kodlarini paylasirsaniz cok iyi olacak
Proje sonunda elimde tutmamışım.
abi allahaşkına kodu tekrar yaz senin listene göre malzeme aldım kod bilgim yok. elimde kalacak malzemeler.
Uygun vakitte tekrar yazarım elbet. Aslında biraz araştırma ve birkaç deneme sonrası kolaylıkla yapabilirsiniz.
güzel çalışma mutlu sona baya tebessüm ettim 😀
kodları paylaşabilir misiniz?
Proje tamamlandıktan sonra elimde tutmamışım. Soran diğer arkadaşlara da ne yazık ki dönemedim. Üzgünüm.